Projet Kilobot "Essaim de robots"
Présentation
Le projet "Essaim de robots" est mon projet annuel de première année d'école d'ingénieur. Au sein d'une équipe de 6 étudiants, nous nous sommes vu attribués la mission de créer une multitude de petits robots qui, individuellement sont peu utiles, mais en groupe de plusieurs dizaines ou centaines d'entités, peuvent accomplir des tâches complexes. Ce projet s'inspire du projet "Kilobot" réalisé au MIT il y plusieurs années.
Ma mission
Ayant déjà de l'expérience dans le domaine, ma mission au cours de l'année a été de développer le design et l'électronique du robot. L'original du MIT se déplaçait par vibration. Cependant, au vu de la complexité, j'ai décidé de faire un robot équipé de roues pour se déplacer et chaque robot possède un code unique (similaire à un QR code) permettant de l'identifier par l'ordinateur central via une caméra.
Conception
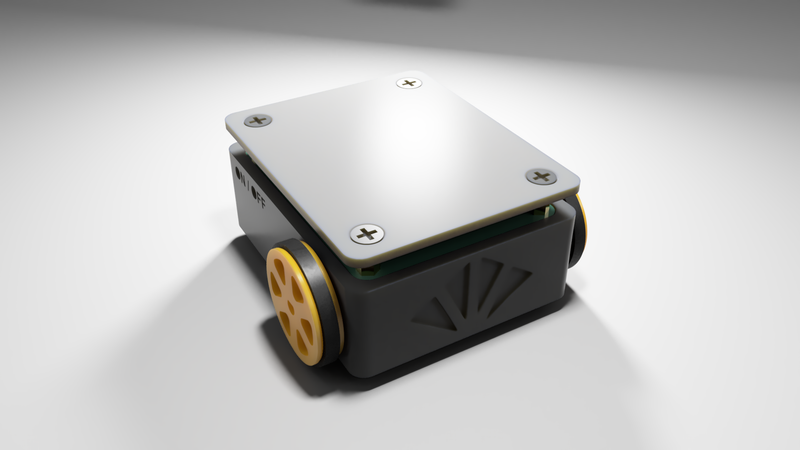
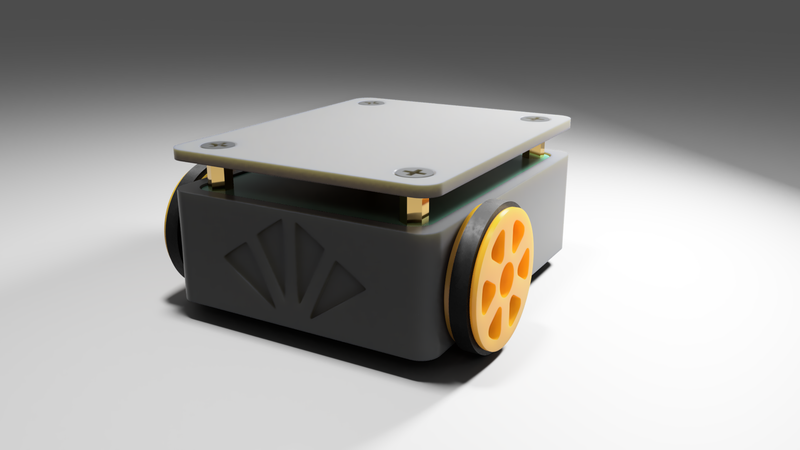
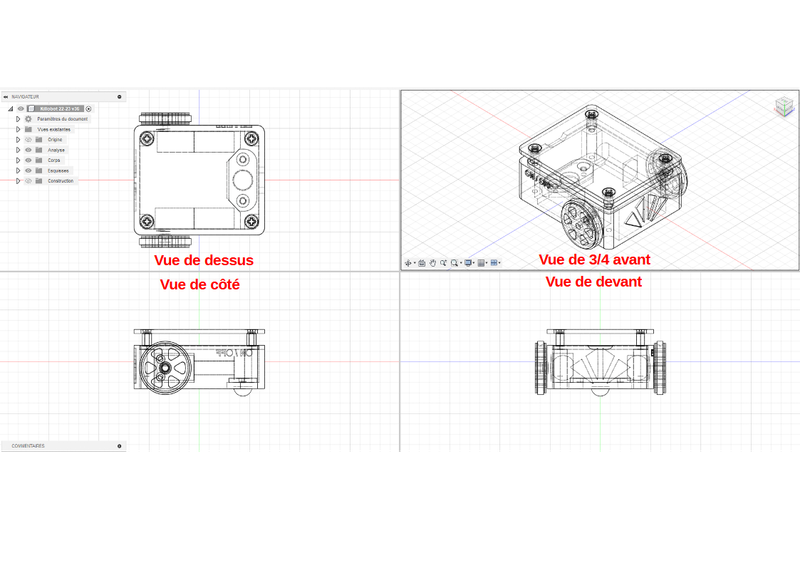
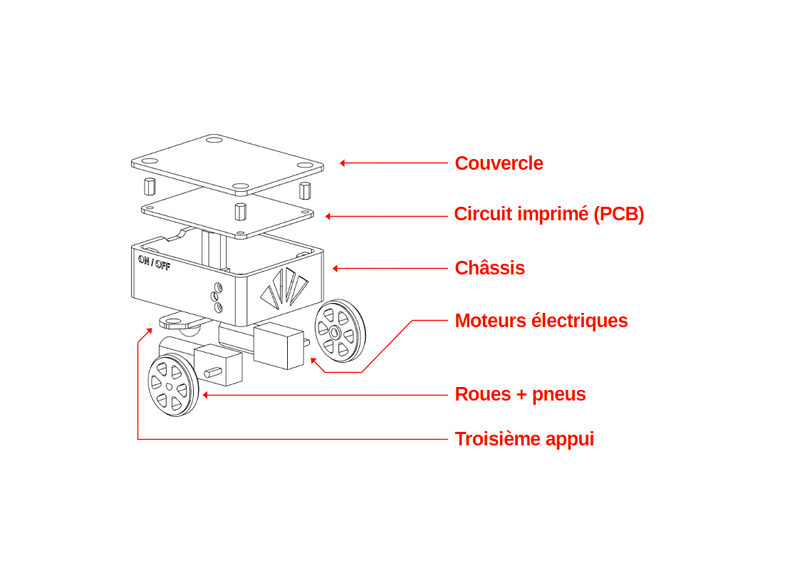
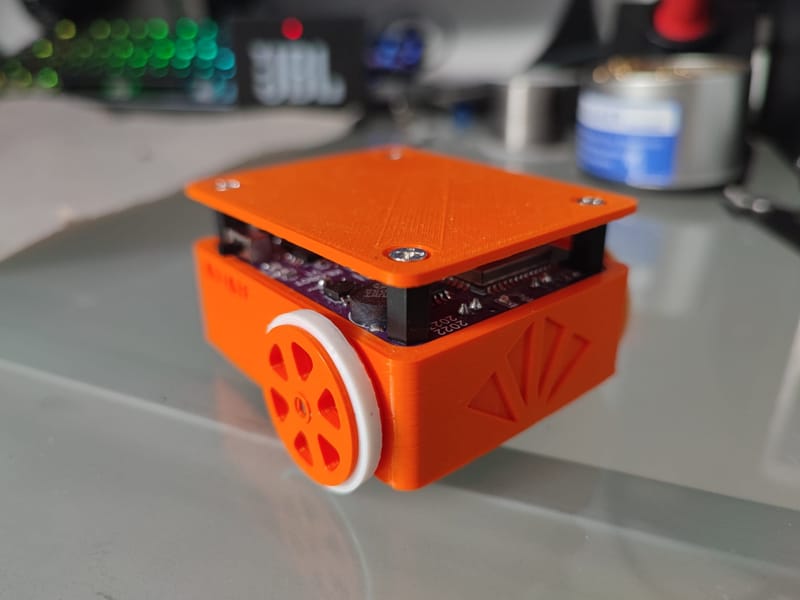
Le robot est composé d'un châssis imprimé en 3D, deux moto-réducteurs permettant d'actionner les roues, un troisième point d'appui, une carte électronique et un support pour le code d'identification.
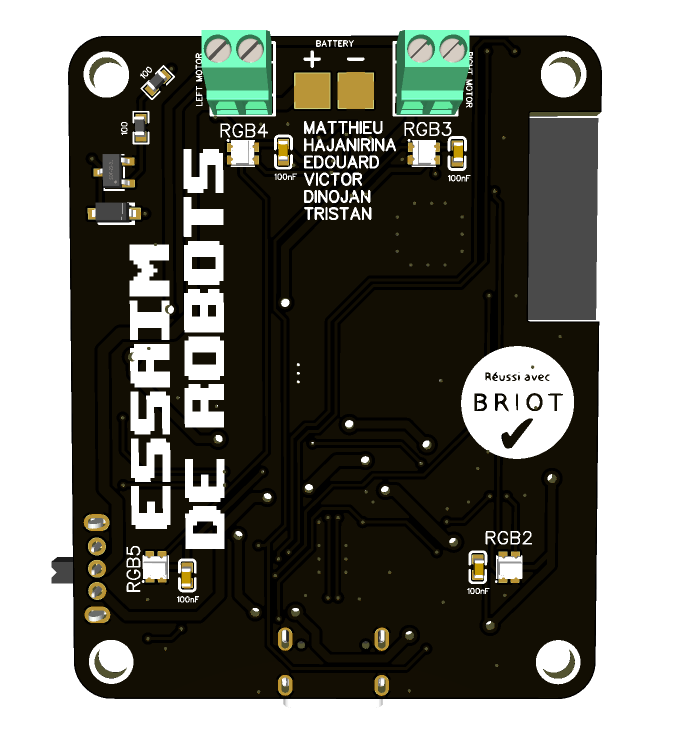
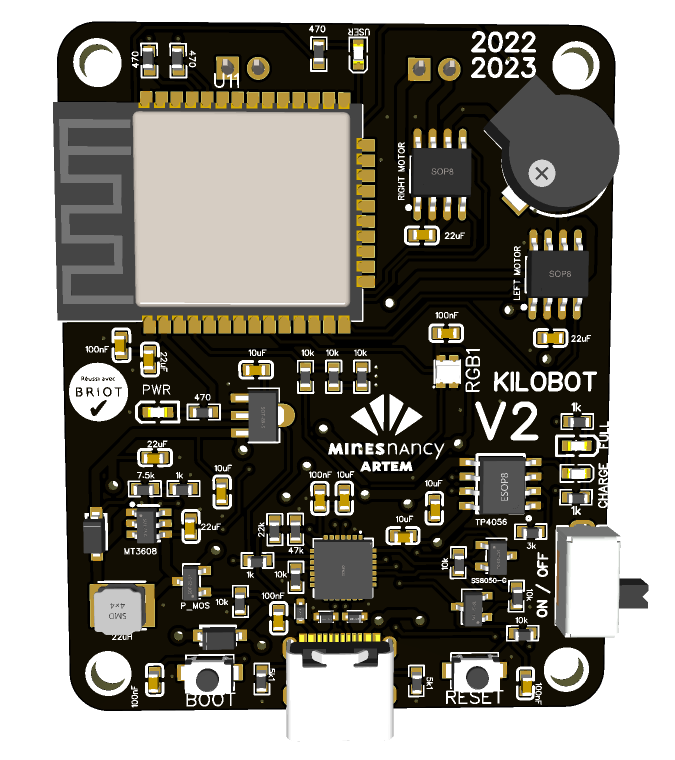
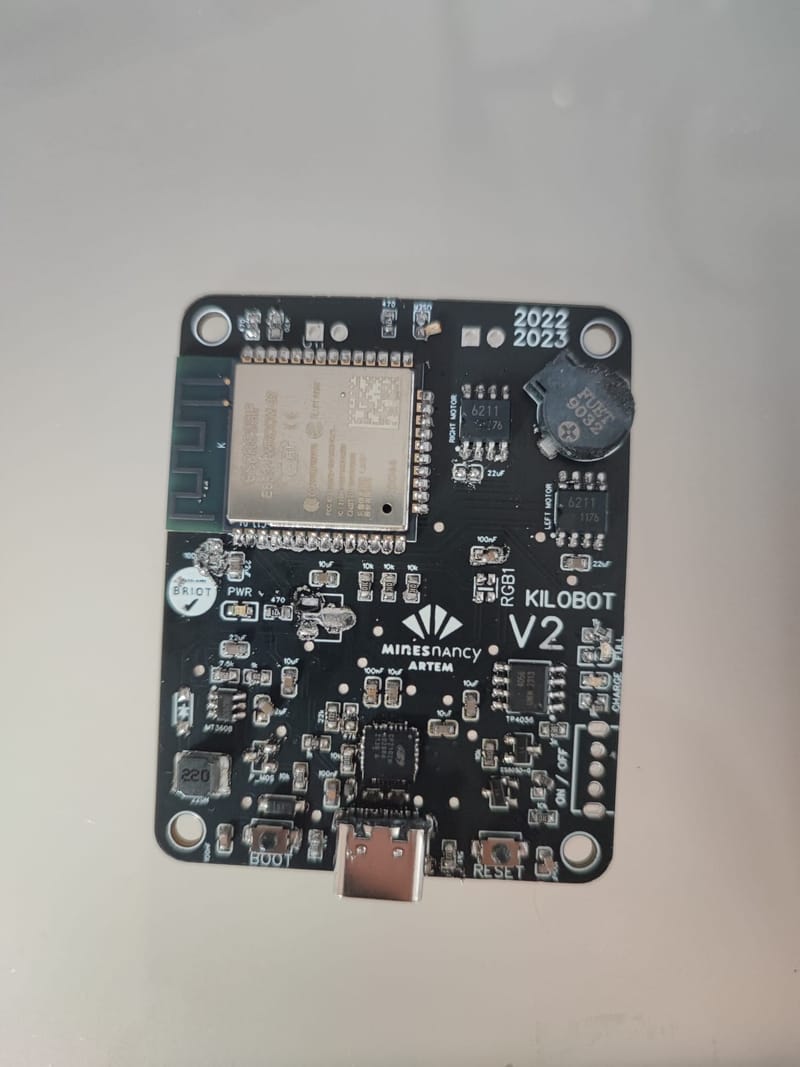
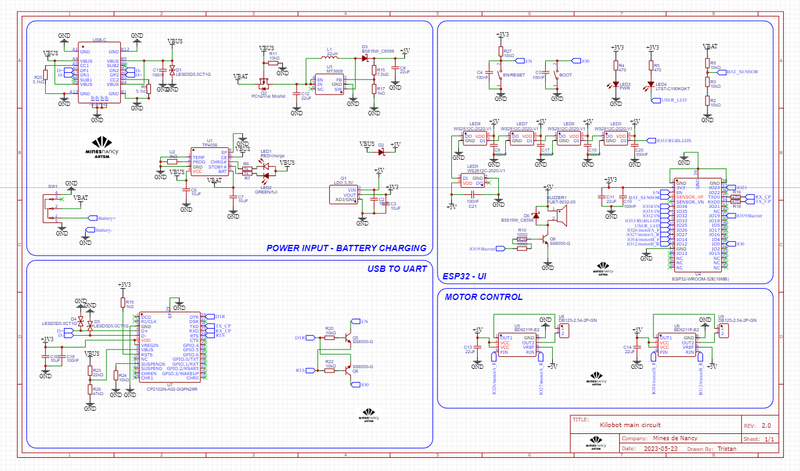
Carte électronique
Les robots doivent être pilotés par un ordinateur central, ils doivent donc être contrôlés à distance. J'ai réalisé un circuit imprimé autour du microcontrôleur "ESP 32", possédant les fonctions Wi-Fi, Bluetooth et pouvant être codé via l'éditeur Arduino IDE. La carte possède tous les éléments d'électronique de puissance, charge et protection de la batterie, communication et contrôle des moteurs.
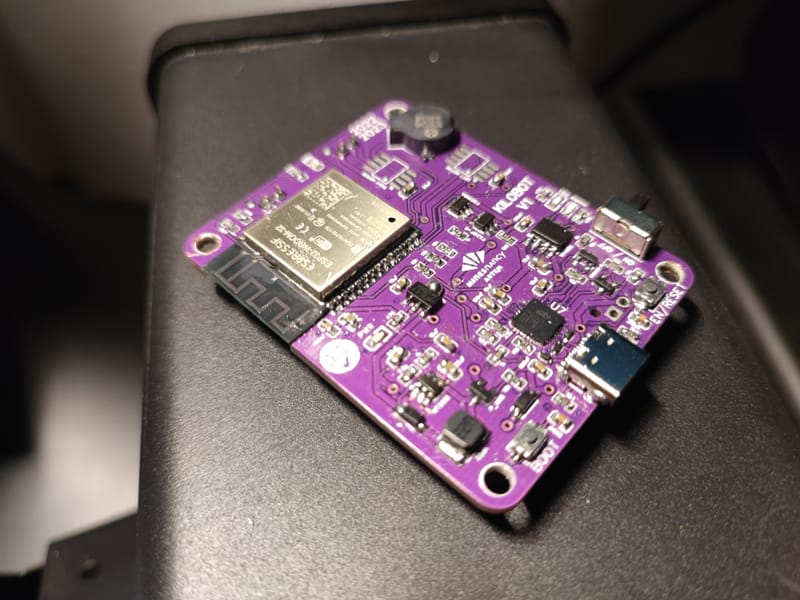
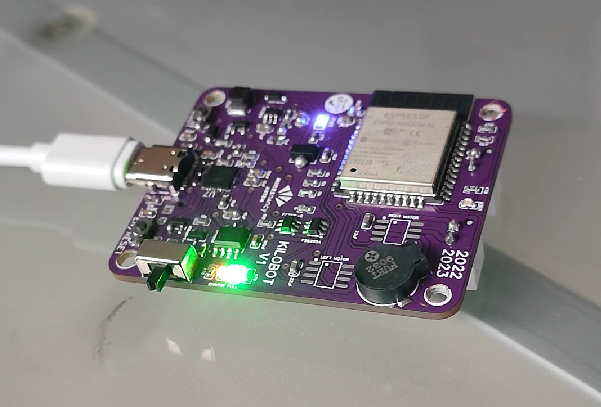
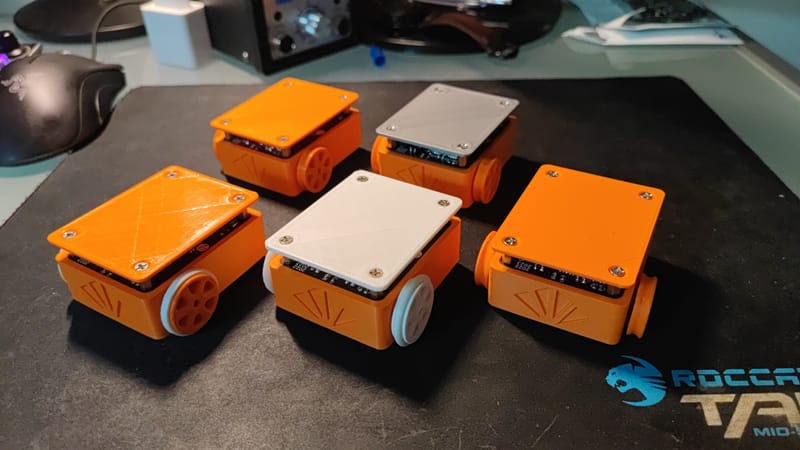
Fabrication et assemblage
Les pièces du châssis ont été imprimées en 3D et la carte électronique a été commandée à un fabricant de PCB sur mesure. Les phases de soudure des circuits et d'assemblage des robots ont été les dernières étapes de ma mission. Par manque de temps, j'ai pu fabriquer seulement 5 robots.


Rapport détaillé
Pour en savoir plus sur ce projet et pour avoir davantage d'informations techniques, le rapport détaillé est disponible en téléchargement en bas de la page "Portfolio"