Fauteuil commandable par le buste
Présentation
Dans le cadre du TIPE (Travail d'Initiative Personnelle Encadré) de la deuxième année de CPGE, j'ai dû travailler sur un projet en lien avec la santé et la sécurité. J'ai choisi de travailler sur l'adaptation d'un fauteuil roulant électrique, pour améliorer le quotidien des personnes en situation de handicap. En effet, ce genre de fauteuil requiert l'utilisation d'une main pour actionner le joystick. Le but de ce projet est donc de rendre un fauteuil électrique pilotable par le basculement du buste de l'utilisateur, libérant ainsi ses deux mains.

Principe de fonctionnement
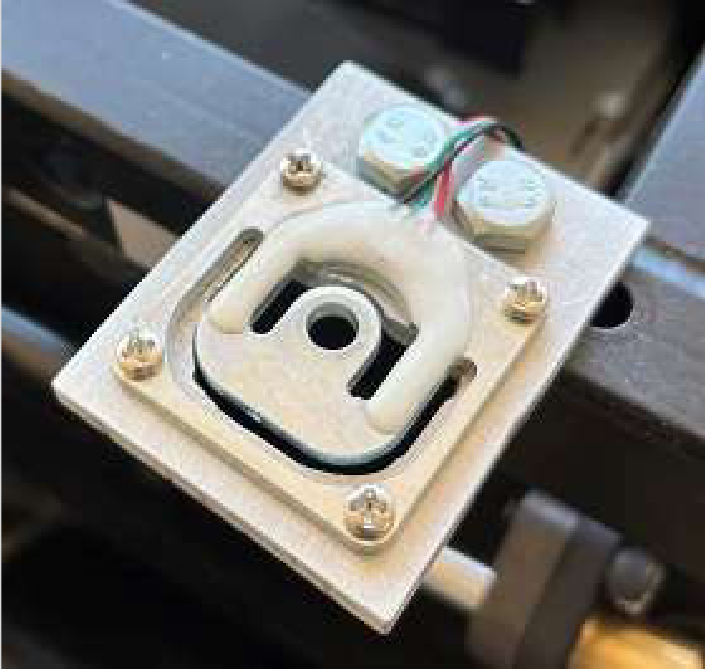
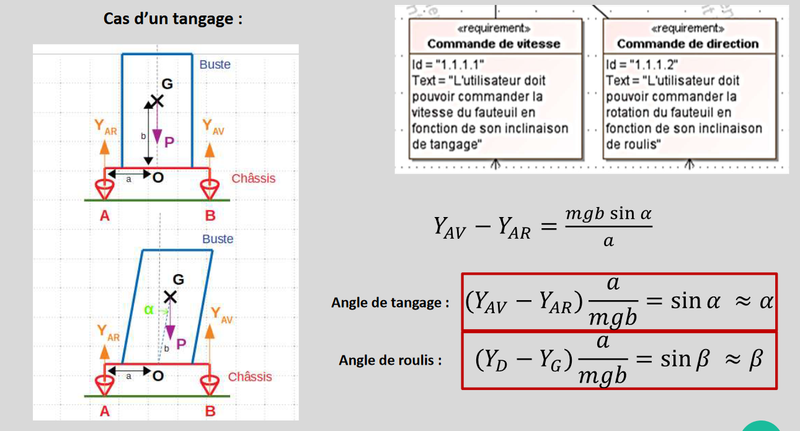
Pour décrypter les mouvements du buste, quatre capteurs de force ont été placés sous les quatre coins de l'assis. Ainsi, lorsque le buste de bascule d'un côté (avant, arrière, droite ou gauche) son poids se répartit différemment sur les capteurs. Ce changement peut être détecté et interprété pour déplacer le fauteuil.
Conception et fabrication
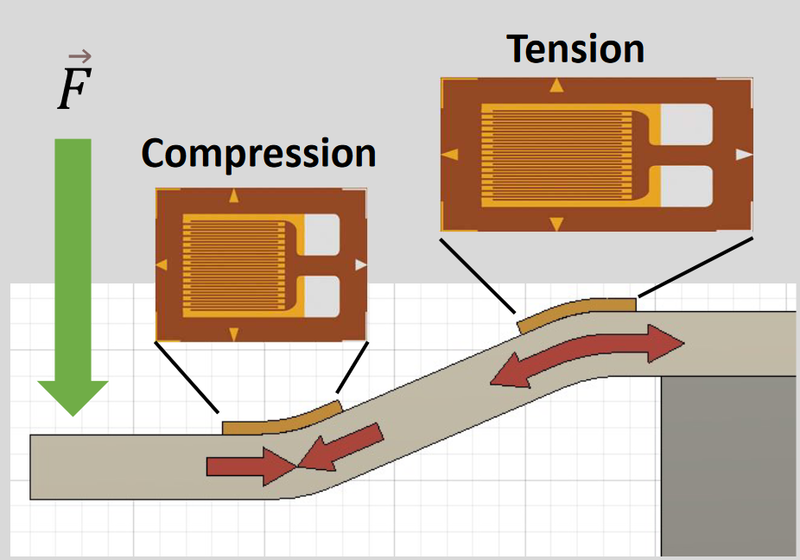
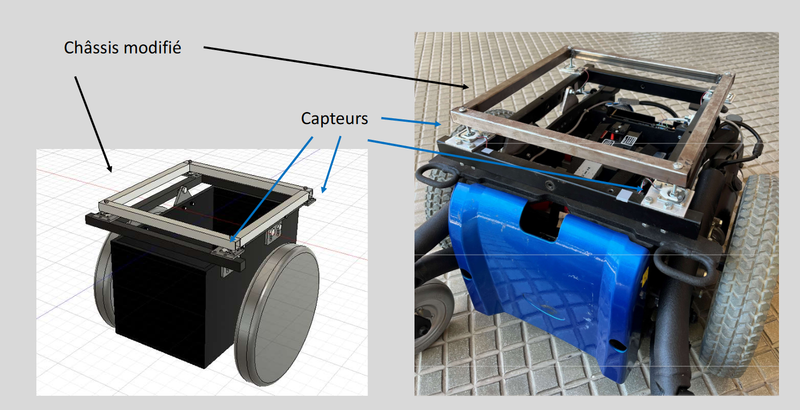
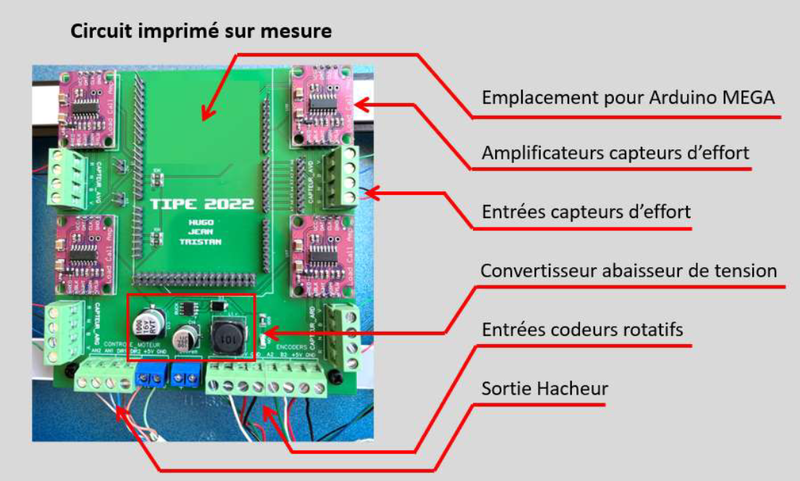
J'ai récupéré un ancien fauteuil roulant électrique du lycée pour le modifier. Un certain travail a été nécessaire pour adapter le châssis et ajouter les capteurs de force. Le signal venant des capteurs (un changement de résistance, fonction affine de la force appliquée) passe dans un amplificateur avant d'être lu par l'Arduino. Ce dernier interprète les 4 signaux venant des 4 capteurs grâce à une loi de comportement pour alimenter les moteurs. Le circuit électrique a été fait sur mesure en utilisant des amplificateurs déjà existants.
Tests et résultat final
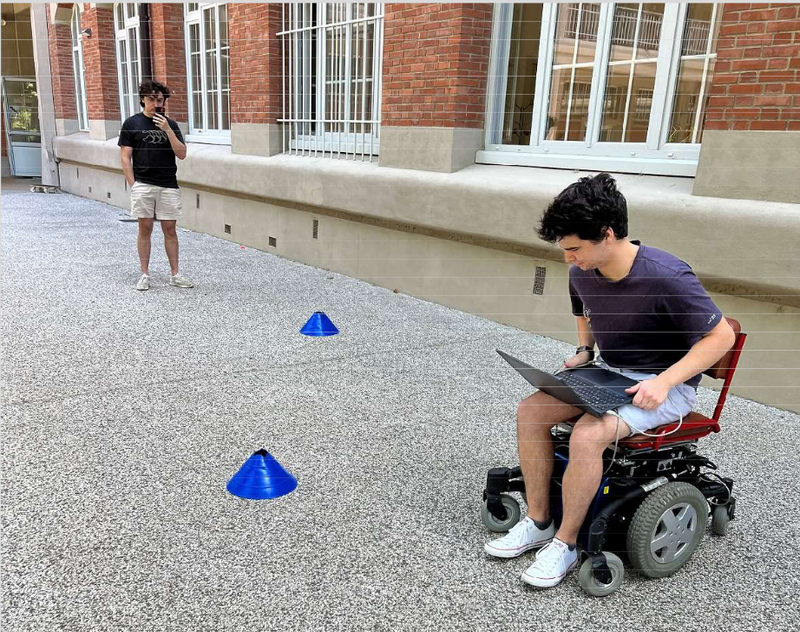
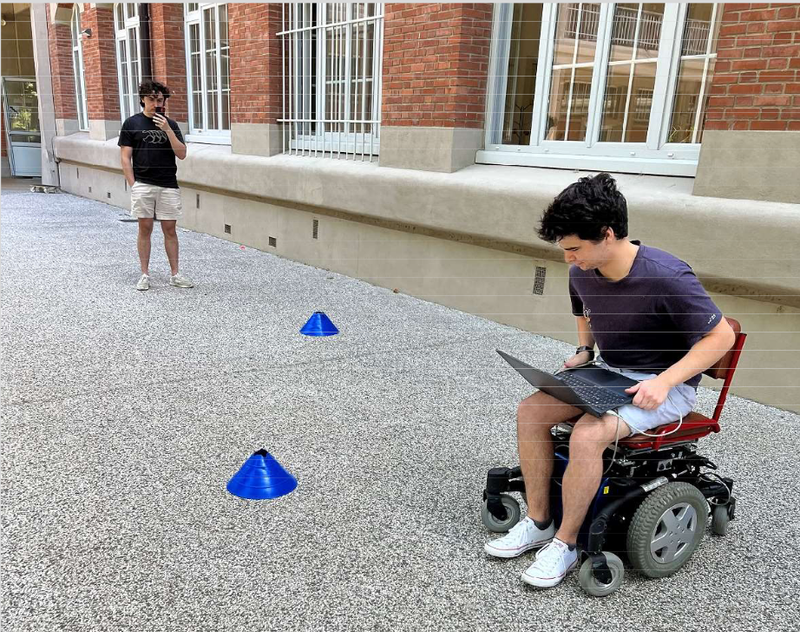
Après plusieurs tests de maniabilité et quelques améliorations de stabilité, ce nouveau fauteuil électrique pilotable par le buste fût un grand succès : je pouvais facilement me mouvoir à travers un parcours d'obstacles, sans utiliser autre chose que le positionnement de mon buste.


Rapport détaillé
Pour en savoir plus sur ce projet et pour avoir davantage d'informations techniques, le rapport détaillé est disponible en téléchargement en bas de la page "Portfolio"