Autres petits projets
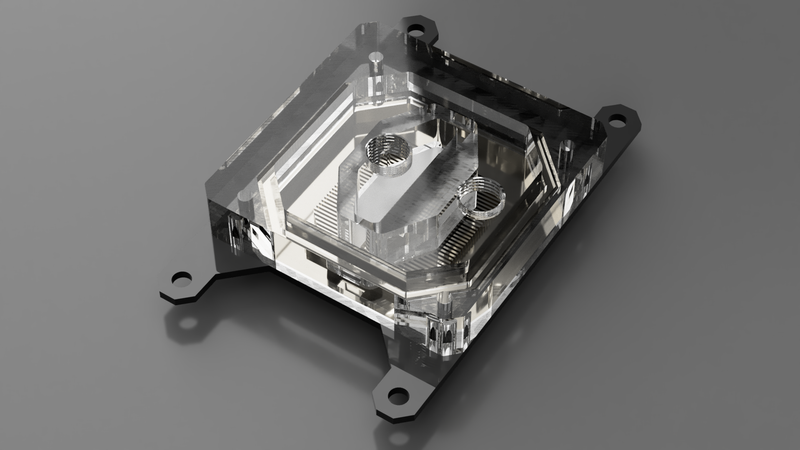
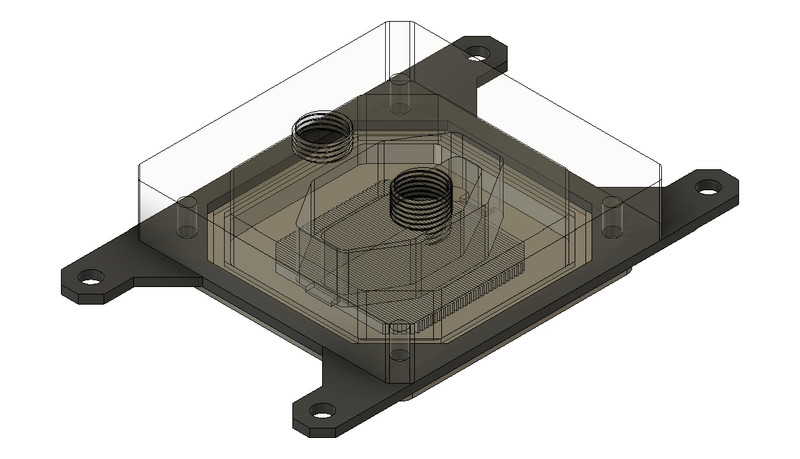
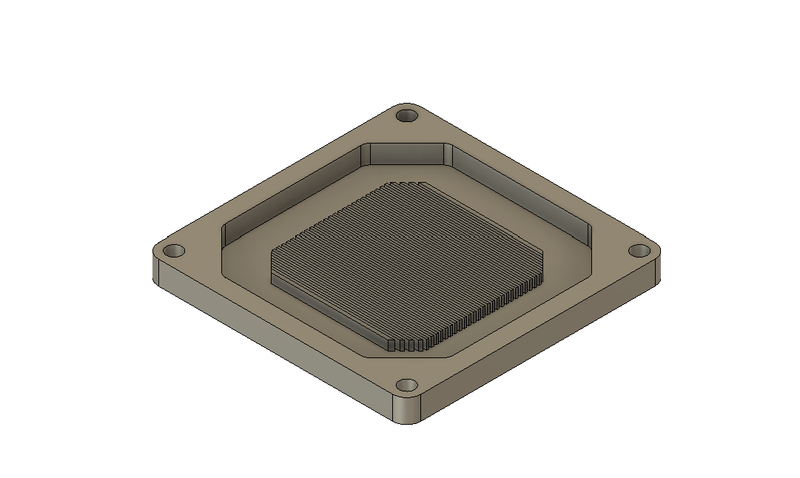
Waterblock pour procésseur
Attache GoPro pour trombone
Un ami musicien voulait filmer, avec une GoPro, ses concerts en tant que joueur de trombone au sein d'un orchestre. Je lui ai conçu et fabriqué une attache pour accrocher sa GoPro sur la coulisse de son instrument. Elle est légère, facilement démontable et n’endommage pas l'instrument.

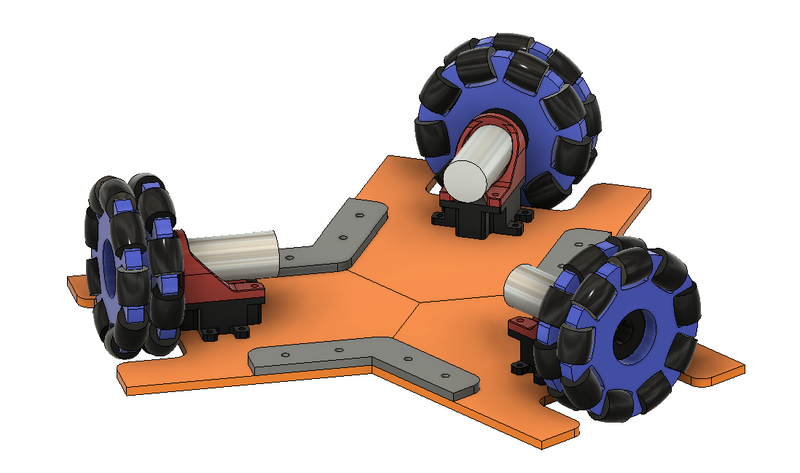
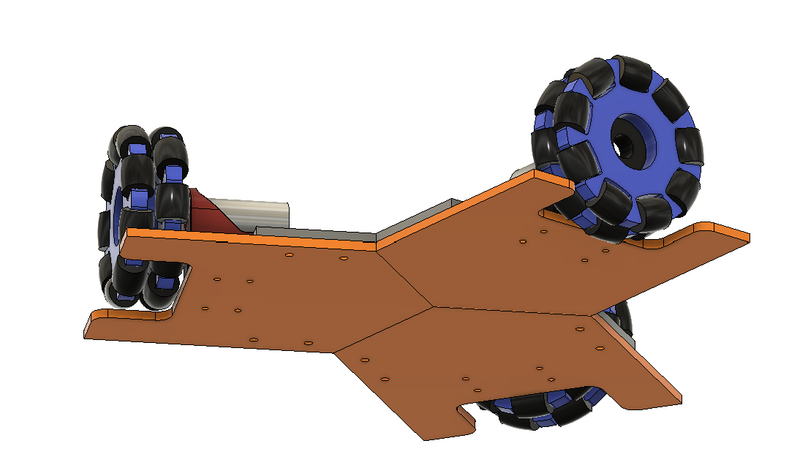
Robot autonome tri-roues
En deuxième année d'école d'ingénieur, j'ai participé avec deux autres collègues, à la coupe de France de robotique, sur le thème de l'agriculture sur Mars. Le but de la compétition était de construire un robot autonome capable de réaliser des tâches sur un plateau de jeu. J'étais en charge du design du robot, tandis que mes collègues s'occupaient de la partie informatique. Malheureusement, par manque de temps, nous n'avons pas pu boucler ce projet. Malgré cela, j'avais réfléchi à un robot possédant 3 "omni-roues" indépendantes, permettant au robot de se déplacer dans n'importe quelle direction du plan, ainsi que de tourner sur lui-même.
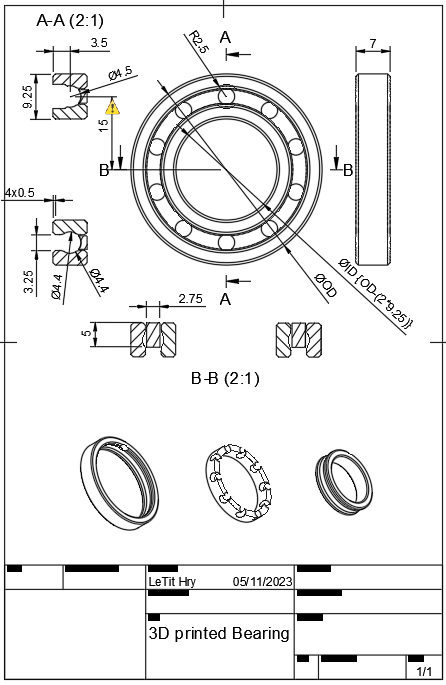
Roulement imprimable en 3D, avec billes en acier

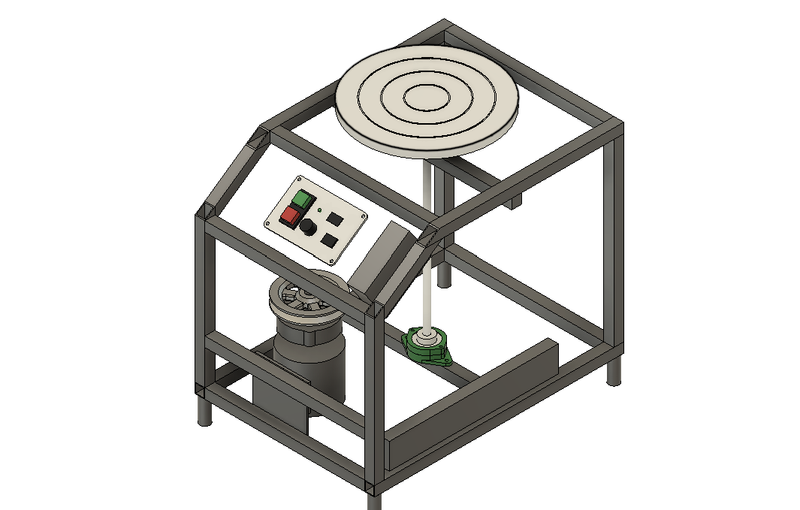
Tour à poterie